
Siamo abituati ad associare a ogni quantità fisica un numero, come ad esempio un chilogrammo di farina per dichiarare la sua massa, oppure 24 ore per il tempo occupato da una giornata.
Queste grandezze si dicono scalari.
Esistono però in fisica alcune grandezze descritte da più informazioni rispetto a un singolo numero: andremo oggi a scoprire le proprietà e le caratteristiche di queste grandezze, dette vettori.
Caratteristiche geometriche
Un vettore è un oggetto matematico che ha delle delle caratteristiche direzionali: non a caso, la sua rappresentazione (ma non la sua natura) è quella di una freccia. In linea generale, un vettore può esistere su un piano, uno spazio tridimensionale o anche in ambienti geometrici più complessi.
Si possono riconoscere alcune caratteristiche geometriche del vettore note come modulo (la lunghezza della freccia, che rappresenta l’intensità della grandezza che il vettore rappresenta), direzione (che è retta della quale il vettore fa parte), verso (in che verso percorre tale retta) e punto di applicazione (da dove parte).
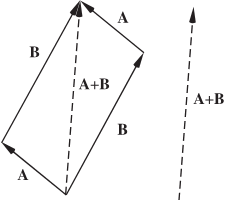
Geometricamente parlando i vettori sono semplici da trattare: ad esempio si possono sommare due vettori semplicemente facendo partire un secondo vettore dalla punta del primo, oppure moltiplicare o dividere un vettore per un numero semplicemente applicando l’operazione al modulo del vettore. Se si moltiplica o divide per un fattore negativo il vettore viene ribaltato.
Componenti dei vettori
L’uso unicamente geometrico dei vettori ci da però spesso soluzioni approssimative, quindi si può ricorrere alla trigonometria (che abbiamo studiato qui) per affrontare i vettori con strumenti matematici più rigorosi.
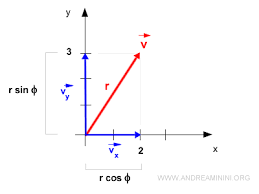
Applicando ad esempio un vettore bidimensionale sul centro di un piano inclinato, è possibile costruire un triangolo rettangolo usando la freccia stessa come ipotenusa: i cateti di questo triangolo saranno le cosiddette componenti (x e y, o orizzontale e verticale) dal vettore, ed è possibile calcolarle usando le regole della trigonometria, cioè moltiplicando l’ipotenusa per il coseno (x) e per il seno (y).
Uno dei modi per descrivere un vettore è proprio usare le componenti: quindi, il vettore A=(-4; 3) è un vettore chiamato “V” di componente x=-4 e componente y=3 (chiamate anche Ax e Ay).
Per il segno (positivo o negativo) di queste componenti posso sia usare seno e coseno degli angoli superiori a 90° che riferirmi a constatazioni geometriche: una componente x negativa, ad esempio, sarà propria di un vettore che punta verso le x negative, cioè convenzionalmente a sinistra del piano cartesiano: infine, una componente nulla implica che il vettore non sia direzionato su quell’asse, quindi un vettore con x=0 sarà verticale mentre uno con y=0 sarà orizzontale.
Una volta che si sono calcolate le componenti di un gruppo di vettori, effettuare tra loro operazioni matematiche sarà per assurdo molto più semplice: la somma di due vettori mi darà un nuovo vettore la cui componente x è la somma di quelle degli altri due vettori e quella y è la somma delle due componenti y, mentre la sottrazione si farà sottraendo le componenti.
Moltiplicare poi un vettore per un numero (“scalare”) implicherà poi semplicemente moltiplicare tutte le componenti per quel valore: da qui risulta evidente come moltiplicare per un numero negativo “ribalti” il vettore.
Alla luce di questo possiamo scrivere delle vere e proprie equazioni vettoriali, andando a lavorare singolarmente sulle varie componenti. Quindi, se io scrivo l’espressione C = 2A – 3B, dove A=(-4; 3) e B=(0;2), io posso calcolare le componenti di C come:
- Cx = 2Ax – 3Bx = 2(-4) -3(0) = -8 -0 = -8
- Cy = 2Ax – 3Bx = 2(3) -3(2) = 6 – 6 = 0
A questo punto potrò anche usare le componenti di C come cateti di un triangolo rettangolo e calcolare il modulo del vettore, cioè l’ipotenusa di questo triangolo, usando il Teorema di Pitagora: questo noto teorema ci dice che l’ipotenusa al quadrato si può ottenere sommando i quadrati dei cateti.
C^2 = Cx^2 + Cy^2
Il teorema di pitagora vale anche in più dimensioni, quindi se avessi un vettore in tre dimensioni mi limiterò a sommare anche un termine Cz^2.
Inoltre, restando stavolta per semplicità in due dimensioni, è possibile anche usare l’arctangente per calcolare l’angolo tra il vettore e l’asse delle x, in modo da poter ritrovare la sua direzione.
Angolo in radianti = arctan(Cy/Cx)